Carlson Field data collection can be used in conjunction with a depth sounder to survey the beds of rivers and lakes. Carlson Field takes input from both a GPS receiver and a depth sounder to determine and record the elevation of the terrain directly below the surveying boat or barge.
All of Carlson Field's routines work with the depth sounder to let you collect points on the underwater terrain. The elevation stored for each point is the elevation of the bed. Modeling of the bed surface works as easily as modeling any surface using Carlson Software. Carlson Field can be a powerful tool for marine surveying and construction.
To modify the Field depth sounder settings, go to the Field menu and
select
Configure Field. Choose the Depth Sounder
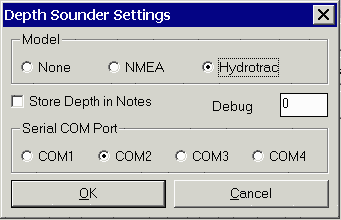
Settings button.
On the next line appears a box labeled Store Depth in Notes. Carlson Field saves point data in a coordinate file and in a text note file. By checking this box, the note file will record the water depth at each reading along with the other information about that point. (Settings to control the rest of the information saved in this file can be found in the menu Configure Field >Point Settings.)
The window labeled Debug should be set to zero for normal use.
The row of buttons labeled Serial COM Port refer to the COM port on your computer where the depth sounder is plugged in. Carlson Field requires two serial points on the computer when working with a depth sounder (one for the GPS and the other for the depth sounder). The depth sounder serial port must be separate from the GPS serial point.
Before working with the depth sounder, we suggest that you make sure the GPS system is working properly with Carlson Field. De-activate the depth sounder by setting the Model to None in the Depth Sounder Settings dialog box. Set up the GPS system that you are using and plug the rover receiver into the COM port for the GPS. Go to Monitor GPS Position under the Field menu. Check that the information being output is correct: Are the latitude and longitude readings what they should be? Are the north and east coordinates aligned to your job coordinate grid? Are the HRMS and VRMS low enough (less than one)? Is the status fixed? If it's autonomous or float, this rover could be having trouble receiving the radio corrections the base receiver should be broadcasting. If everything is working properly, exit the monitor screen and start the depth sounder setup.
Measure the vertical distance from the GPS antenna to the surface of the water. This distance will be called the rod height. Go to the Configure Field>General Settings window and enter this measurement in the Rod Height box.
Plug the depth sounder into the depth sounder COM port on your computer. Go to the Configure Field>Depth Sounder Settings window and set the depth sounder Model. Set the rest of these settings as you want them and click OK.
Go back to Monitor GPS Position. Everything should appear as before, except there should be a new entry called Depth and Elevation should have changed to Bottom Elv. The correct depth should be showing and the Bottom Elv should be showing the elevation of the bed.
The usual Carlson Field functions will all work with the depth sounder active. The windows for Monitor, Point Store and Auto Points at Interval will display the depth when the depth sounder is set as active.