|
Configure Base/Rover (Trimble GPS)
|
|
Configure Base/Rover (Trimble GPS)
|
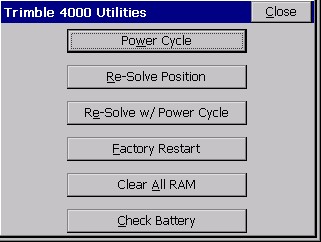
Trimble 4000 GPS
The Trimble GPS 4000 is an older series of GPS receiver. The panel on the receiver itself can be used on the Trimble 4000 to configure for RTK. There is no Configure Base or Configure Rover in SurvCE for the Trimble 4000.
Trimble GPS General (4700, 5700 and 5800)
This configuration is used for most current brands of Trimble GPS, including the Trimble 5700 and Trimble 5800. The Trimble 5700 is often used as a base in conjunction with the Trimble 5800, which has the wireless ōBluetoothö communication feature. To use the Bluetooth feature, the Trimble TSCe is outfitted with an adapter on one of its serial ports which includes the internal radio. For use with SurvCE, the standard serial cable is recommended. To use the cable, disable ōBluetoothö.

The Trimble 5800 with Zephyr antenna has a panel that includes an On-Off button at right.

There are three LCD lights. From left, the first round light is yellow and flashes or pulses at 1 per second when sufficient satellites have been acquired for RTK, and flashes quickly when insufficient satellites are available. The second round light is a pulsing green light indicating radio linkage. When the pulse is intermittent, radio connection is being interrupted. The third, rectangular light is green and indicates battery status. It is steady on when there is sufficient battery power.

Note on the Trimble 5700 that the power on-off button is on the right, the next two buttons to the left show the usage of battery 1 and an optional battery 2. Three LCD lights appear along the bottom left of the 5700 panel. The middle button pulses red and is a satellite indicator: steady 1 second pulse means good satellite reception and fast pulsing means insufficient satellites. The LCD to the left is steady on amber if static data is being logged to the receiver. When you configure the base with the Trimble dataloggers, you can set it to do RTK with PPInfill, which will do both RTK and static logging. SurvCE can be used to configure the base or will drive the rover when the base has been configured by the Trimble datalogger. A typical antenna usage would be the Zephyr Geodetic for the base (mitigates multi-path) and the Zephyr for the 5800 rover. Consult your Trimble reference manuals for more detailed information.
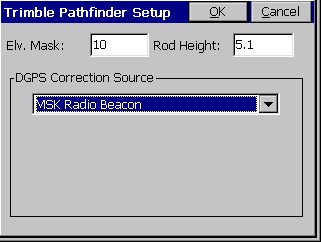
Trimble PathFinder
This is another ōGIS-levelö receiver, which typically gets corrections from either a Beacon or a dedicated satellite in space (Racal), and has an approximate accuracy of 1 meter. An option to read OmniStar has been added. There is no Configure Base or Receiver Utilities option, but there is a Configure Rover option.